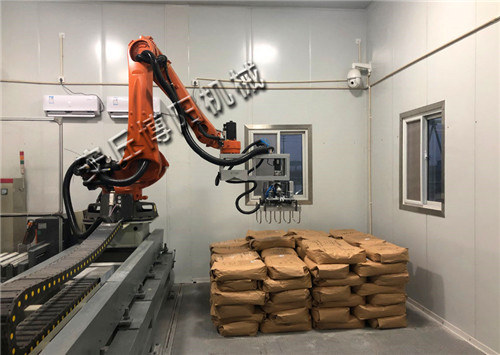
博阳机械尿素视觉拆垛机器人的工作流程:人工使用叉车将一托盘物料放至托盘滚筒输送线,每段输送线都有到位检测传感器,检测到托盘物料到位后输送线停止;机器人携带3D视觉到达满垛盘正上方。通过3D视觉识别出垛盘的形状和位置。3D视觉把垛型的数据传递给机器人;机器人按照3D视频传来的数据,来指导机器人进行运动;机器人运动到产品的正上方,抓手进行抓取;机器人携带产品到输送线的正上方,松开抓手,产品自动掉落到输送线上,后进行进行装车或直接上料加工(如拆包)。
尿素视觉拆垛机器人的产能高,相对于人工拆垛,它具有持续效率高的工作优势,并且低成本,在拆垛量大且持续时间长的前提下,相对于日益升高的人力成本,总的成本低于人力成本的投入。电话:18365669156 郑
